Staattisen maalaserkeilauksen yhteydessä maastomittauksissa haluttaisiin mielellään käyttää satelliittipaikannusta skannerin paikantamiseen. Ja miksipä ei, jos skannerin suuntaus pohjoiskulmaan nähden saadaan myös määritettyä vaikkapa kompassin avulla. Tosin yhdistäminen onnistuu ilman suuntatietoakin, mutta toimistotyön aika kasvaa.
GPS/GNSS-paikannusta käytettäessä tulee muistaa, ettei paikannustarkkuus riitä lopulliseksi sijaintitarkkuudeksi, vaan pistepilvien yhdistämisohjelmassa täytyy olla mahdollisuus parantaa skannausasemien keskinäistä sijaintia pistepilvien yhteisiä alueita hyväksi käyttäen. Näin siksi, että RTK-mittauksella pistepilvet jäävät harittamaan useita senttejä, käytännössä olemme usein nähneet heikoimmassa elementissä eli korkeudessa jopa kymmenien senttien heittoja. Oma tukiasemaa käytettäessä paikannustarkkuus paranee, mutta varsinkin Z-koordinaattiin näyttää edelleen jäävän suurempaa mittausepävarmuutta.

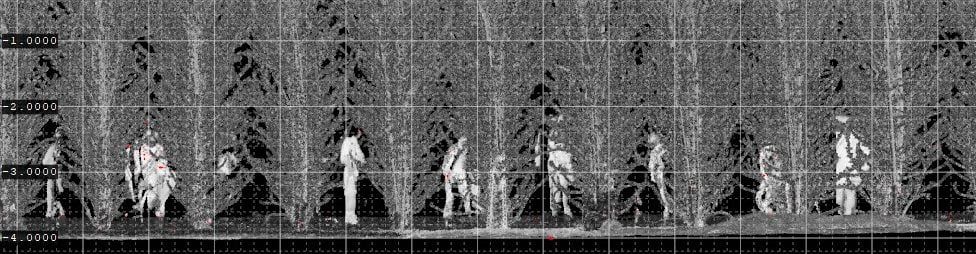
Kuvassa 4 skannausasemaa on paikannettu GPS-mittauksin koordinaatistoon. Asemat ovat siis jo rekisteröity keskenään, mutta pistepilvien XY-koordinaatit heittävät 1-5 cm ja Z-koordinaatti 5-10 cm ja karkeimmillaan 50 cm (valk. pisteet). Havaintojemme mukaan tämä on tyypillistä RTK-korjausta käytettäessä.
Skannausasemien sijainnit voi mitata GPS-vastaanottimella erikseen ja yhdistää pistepilviin myöhemmin toimistossa.
 Rieglin skannereissa vastaanotin voidaan myös sijoittaa skannerin päälle, kytkeä skanneriin ja tallentaa sijaintitieto skanneriin heti mittauksen aikana, kuten viereisessä kuvassa on näytetty. Skannerin ohjausnäytöstä voidaan tarkistaa GPS-yhteyden tila ja ja laatu. Riegl on tehnyt GPS-yhteydestään laiteriippumattoman, sillä näin halutaan parantaa eri laitteiden ristikäyttöä vain asetuksia vaihtamalla.
Rieglin skannereissa vastaanotin voidaan myös sijoittaa skannerin päälle, kytkeä skanneriin ja tallentaa sijaintitieto skanneriin heti mittauksen aikana, kuten viereisessä kuvassa on näytetty. Skannerin ohjausnäytöstä voidaan tarkistaa GPS-yhteyden tila ja ja laatu. Riegl on tehnyt GPS-yhteydestään laiteriippumattoman, sillä näin halutaan parantaa eri laitteiden ristikäyttöä vain asetuksia vaihtamalla.
Pistepilvien käsittelyvaiheessa skannerista/muistitikulta puretaan siis valmiiksi koordinaatistoon rekisteröity aineisto tietokoneelle. Tässä vaiheessa tarkastetaan ensin yhdistämisen laatu ja sen jälkeen joudutaan hyvin todennäköisesti turvautumaan RiSCan Pro-ohjelman verkkotasoitusominaisuuteen. Iteraatiivisesti laskeva yhdistämisalgoritmi on hyvin tehokas, kunhan vain pistepilvissä on mitattu aineistoille yhteisiä osia. Itseasiassa kaikkia asemia ei tarvitse mitata koordinaatistoon, vaan verkkotasoituksella sijaintitietoa vailla olevat asemat voidaan yhdistään naapureihinsa suurella tarkkuudella. Epätarkkuudestaan huolimatta GPS-mittauksen mahdollisuus on haluttu tuoda ohjelmaan, sillä jälkityöhön käytetty aika lyhenee aineistojen sijaitessa jo karkeasti paikoillaan. Lisäksi turvallisuussyistä esimerkiksi kaivoksilla on parempi välttää erillisten tähysten käyttöä, vaikka niiden avulla yhdistämisestä tulee heti tarkempi.
Omat kokeilut skannerin ja GPS-mittausten yhteiskäytöstä ovat konkretisoineet GPS-mittausten mittausepävarmuuden. Mitatessa pisteitä pelkästään GPS:llä, virhettä ei havaitse pisteiden sijaitessa useiden metrien päässä toisistaan. Nämä virheet uppoavat sitten ilmeisen kivuttomasti esimerkiksi tilavuuksien laskentaan. Tilavuudet ovat siinä mielessä mielenkiintoisia käsitteitä, että moni hinnoittelu perustuu siirrettyihin massoihin. Päällekkäiset pistepilvet ovat armottomia paikannusvirheiden paljastajia, sillä asiakkaille ei voi luovuttaa yllä olevan kuvan mukaisia aineistoja eikä niistä voi laskea tilavuuksiakaan. Visualisoinnissa on voimaa!
PS. Lähtökohtaisesti luotamme Rieglin mittaustuloksiin monasti jopa takymetrimittauksiin verrattaessa, sillä Rieglin kokonaismittaustarkkuus vastaa hyvää takymetriä kulmamittaustarkkuuden ollessa muita skannereita huomattavasti tarkempi.
PSS. Mainitsemani GPS-mittaukset tekevät yleensä alan ammattilaiset eli eri tahojen ja eri valmistajien laitteilla näyttää tasapuolisesti päätyvän samankaltaisiin mittaustuloksiin. Maailmanlaajuisesti mobiiliskannausjärjestelmien valmistajat ja käyttäjät ovatkin todenneet GPS-mittaustarkkuuden olevan yksi suurimpia alan kehityksen pullonkauloja.